
How to Build a Vibration Motor Circuit
In this project, we will show how to build a vibration motor circuit.
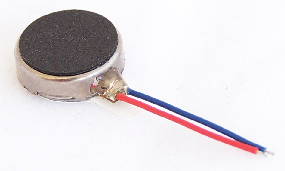
A vibration motor is a motor which vibrates when given sufficient power. It is a motor that literally shakes.
It is very good for vibrating objects. It can be used in a number of devices for very practical purposes. For example, one of the most common items that vibrate are cell phones that vibrate when called when placed in vibration mode. A cell phone is such an example of an electronic device that contains a vibration motor. Another example can be a rumble pack of a game controller that shakes, imitating the actions of a game. One controller where a rumble pack could be added as an accessory is nintendo 64, which came with rumble packs so that the controller would vibrate to imitate gaming actions. A third example could be a toy such as a furby that vibrates when you a user does actions such as rub it or squeeze it, etc.
So vibration motor circuits have very useful and practical applications that can serve a myriad of uses.
To make a vibration motor vibrate is very simple. All we have to do is add the needed voltage to the 2 terminals. A vibration motor has 2 terminals, usually a red wire and a blue wire. The polarity does not matter for motors.
For our vibration motor, we will be using a vibration motor by Precision Microdrives. This motor has an operating voltage range of 2.5-3.8V to be powered.
So if we connect 3 volts across its terminal, it will vibrate really well, such as
shown below:
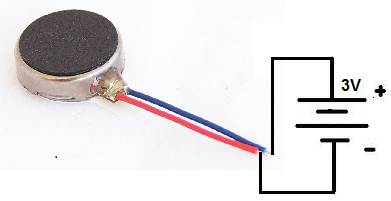
This is all that is needed to make the vibration motor vibrate. The 3 volts can be provided by 2 AA batteries in series.
However, we want to take the vibration motor circuit to a more advanced level and let it be controlled by a microcontroller such as the arduino.
This way, we can have more dynamic control over the vibration motor and can make it vibrate at set intervals if we want or only if a certain event occurs.
We will show how to integrate this motor with an arduino to produce this type of control.
Specifically, in this project, we will build the circuit and program it so that the motor vibrates
every minute.
Parts Needed
- Arduino Board
- Vibration Motor
- 1N4001 Diode
- 0.1µF ceramic capacitor
- 1KΩ Resistor
- 2N2222 NPN Transistor
- USB Connector
The vibration motor we will use is the shaftless vibration by Precision Microdrives. This can be obtained from Sparkfun at the following link: Sparkfun- Vibration Motor. The part number is ROB-08449.
The vibration mechanism and all moving parts are protected within the metallic housing encasing of the motor. For sturdiness and strength, the wires are reinforced and there is a 3M adhesive on its back surface.
The motor will vibrate considerably when supplied with 3V.
The datasheet for this vibration motor is at the following link: Precision Microdrives Vibration Motor Datasheet.
Almost any NPN transistor can be used to provide current amplification. If you do not have a 2N2222 NPN at hand,
then substitute it for a 2N3904.
Vibration Motor Circuit
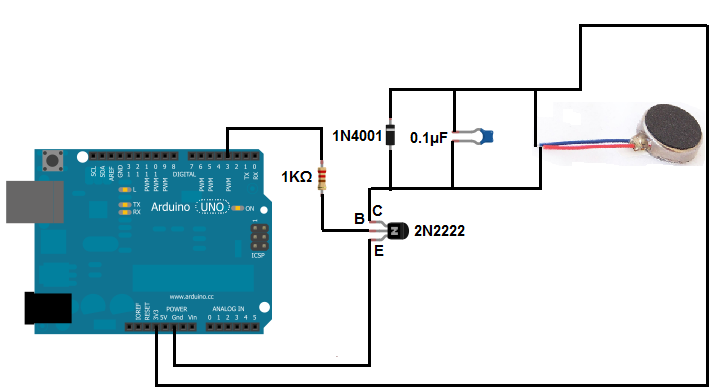
The vibration motor circuit we will build is shown below:
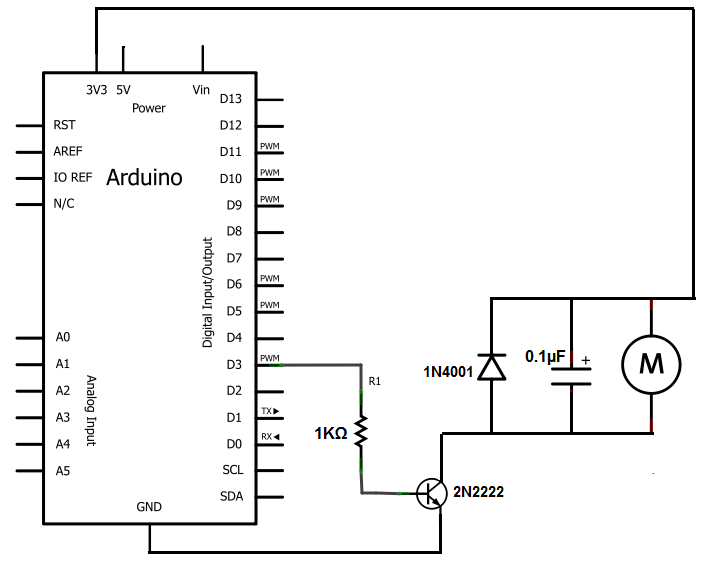
The schematic diagram for this circuit is:
When driving a motor with a microcontroller such as the arduino we have here, it is important to connect a diode reverse biased in parallel to the motor. This is also true when driving it with a motor controller or transistor. The diode acts as a surge protector against voltage spikes that the motor may produce. The windings of the motor notoriously produce voltage spikes as it rotates. Without the diode, these voltages could easily destroy your microcontroller, or motor controller IC or zap out a transistor. When simply powering the vibration motor directly with DC voltage, then no diode is necessary, which is why in the simply circuit we have above, we only use a voltage source.
The 0.1µF capacitor absorbs voltage spikes produced when the brushes, which are contacts connecting electric current to the motor windings, open and close.
The reason we use a transistor (a 2N2222) is because most microcontrollers have relatively weak current outputs, meaning they don't output enough current to drive many different types of electronic devices. To make up for this weak current output, we use a transistor to provide current amplification. This is the purpose of this 2N2222 transistor we are using here. The vibration motor needs about 75mA of current to be driven. The transistor allows this and we can drive the motor. To make sure that too much current does not flow from the output of the transistor, we place a 1KΩ in series with the base of the transistor. This attenuates current to a reasonable amount so that too much current isn't powering the motor. Remember that transistors usually provide about 100 times the amplification to the base current that enters through. If we don't place a resistor at the base or at the output, too much current can be damaging to the motor. The 1KΩ resistor value isn't precise. Any value can be used up to about 5KΩ or so.
We connect the output that the transistor will drive to the collector of the transistor. This is the motor as well as all components it needs in parallel with it for protection of the electronic circuitry.
Now that you understand why we use all the components which we do, let's go to the
code that allows the motor to vibrate every minute.
Vibration Motor Code
The code that vibrates the motor every minute is shown below:
const int motorPin = 3;
void setup()
{
pinMode(motorPin, OUTPUT);
}
void loop()
{
digitalWrite(motorPin, HIGH);
delay(1000);
digitalWrite(motorPin, LOW);
delay(59000);
}
The following code, again, vibrates the motor every minute for 1 second of a duration of time.
The first line of code declares that the motor is connected to arduino pin D3.
The second block of code sets the digital pin D3 as output. This output represents the motor.
The third block of code turns the motorPin HIGH and delays it 1000ms. This represents the motor turning on for 1 second. The second half of this block then turns the motorPin LOW and delays it 59,000ms. This represents the motor being shut after being on for a second and staying off for 59 seconds. So, in total, the motor turns on every minute for 1 second of time.
This is just one type of circuit that can be built. There are many variations which can be done, including the motor shaking when a certain action is
done such as noise being detected or motion being detected. With a microcontroller such as an arduino, we have more control.
Also note that the 3.3V terminal on some arduinos may supply enough current to power the vibration motor. So you may be able to run this same circuit without
the transistor setup. However, if you are powering multiple motors (in parallel), then a transistor may then be absolutely necessary.